Zugversuche

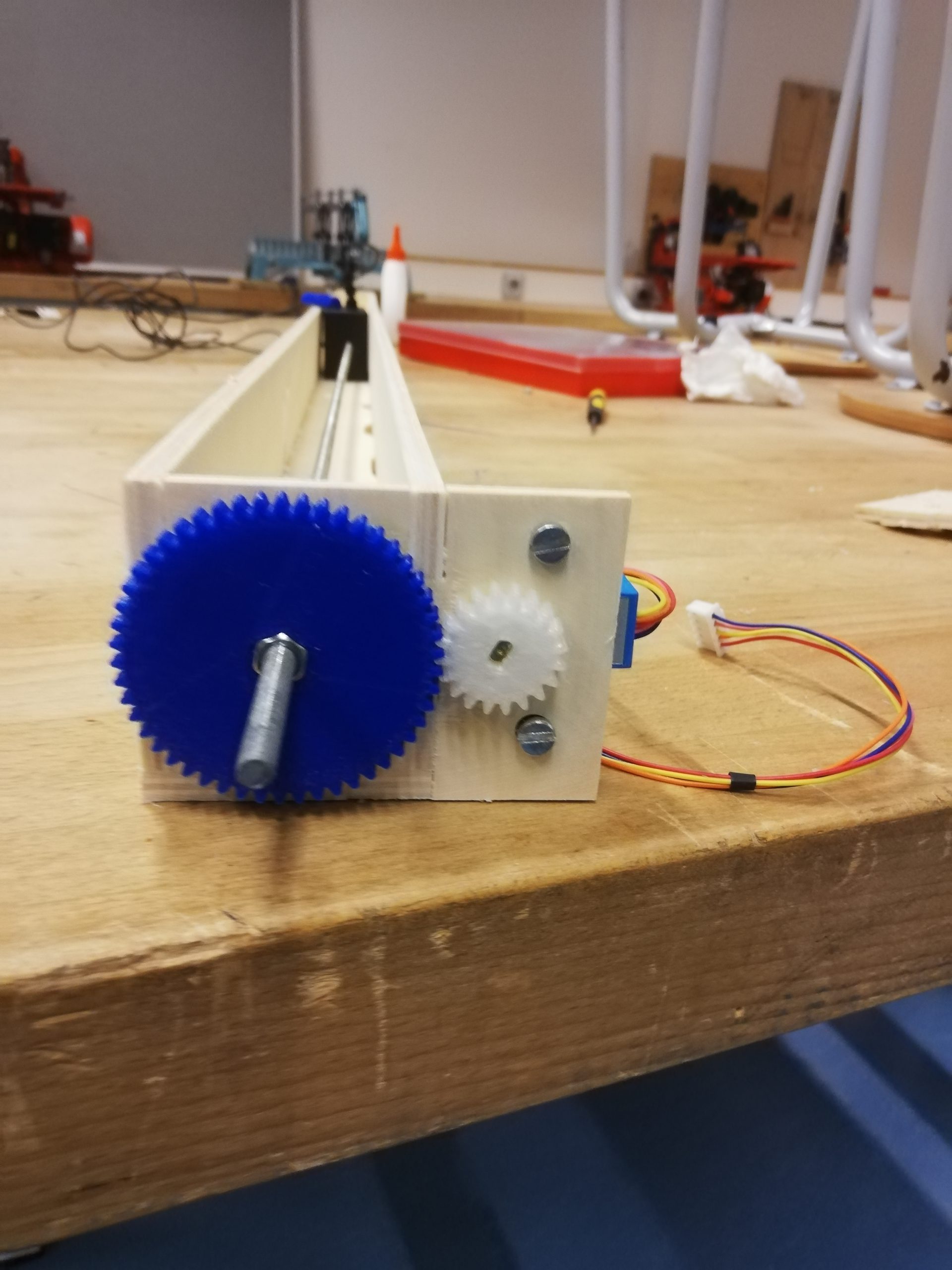
In einer Holzrinne (CNC-gefräst) wird ein zu untersuchende Draht zwischen eine feste Halterung und einen elektronischen Kraftmesser gespannt. Dieser wird über eine Gewindestange und ein Getriebe (3-D-gedruckt, Druckdateien ) durch einen Schrittmotor immer mehr gespannt. Die Ansteuerung des Getriebemotors und das Einlesen der Kraftwerte erfolgen über den Arduino.
Aus der Drehzahl des Motors, der Getriebeübersetzung und der Gewindestangensteigung kann über die Zeit die Dehnung berechnet werden.
Mit der Kraftmessung und der Querschnittsfläche des Drahtes bekommt man die Spannung.
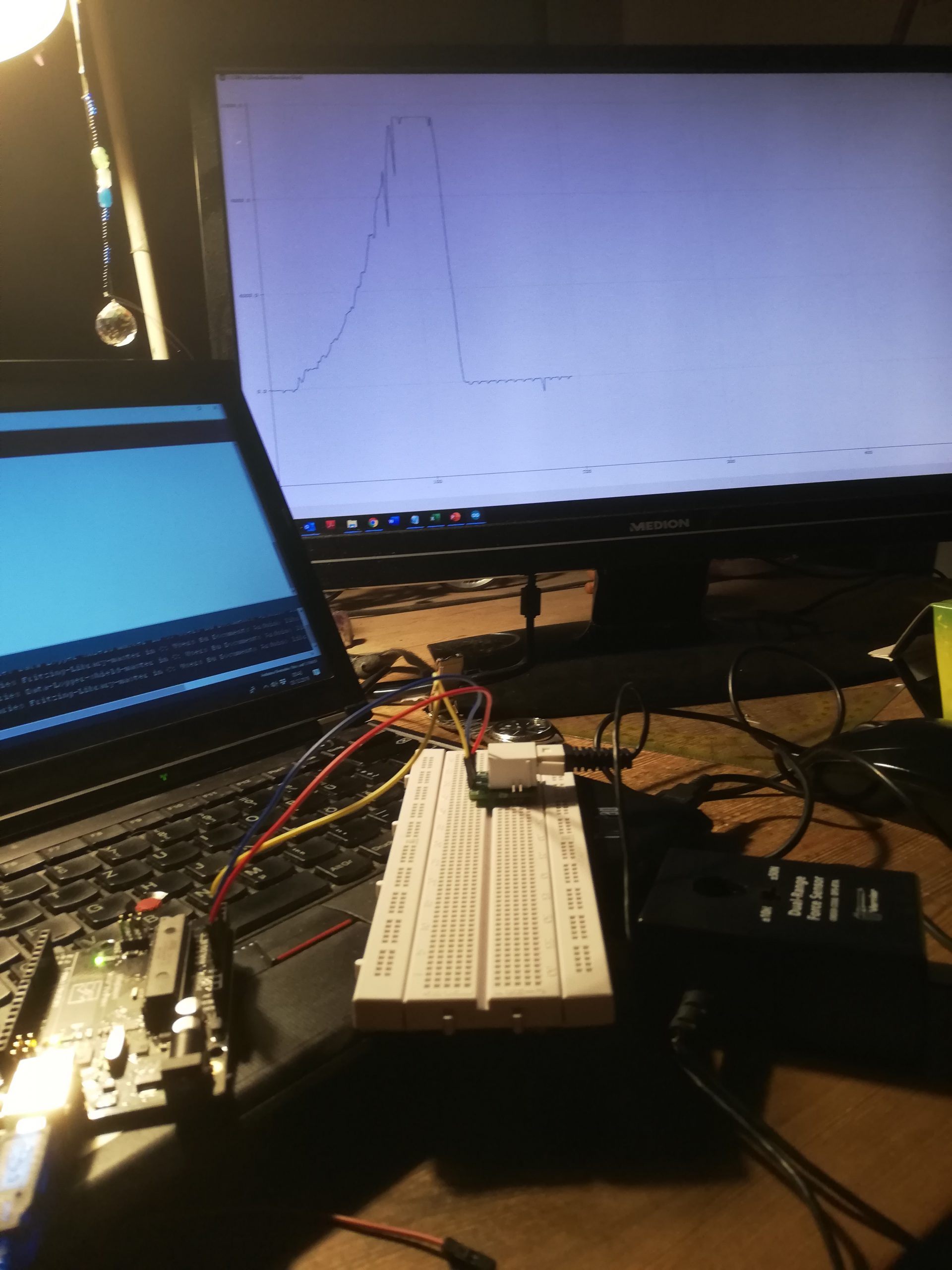
Resultat ist das Spannungs-Dehnungsdiagramm des entsprechenden Materials, hier: Eisen.
Fotodokumentation
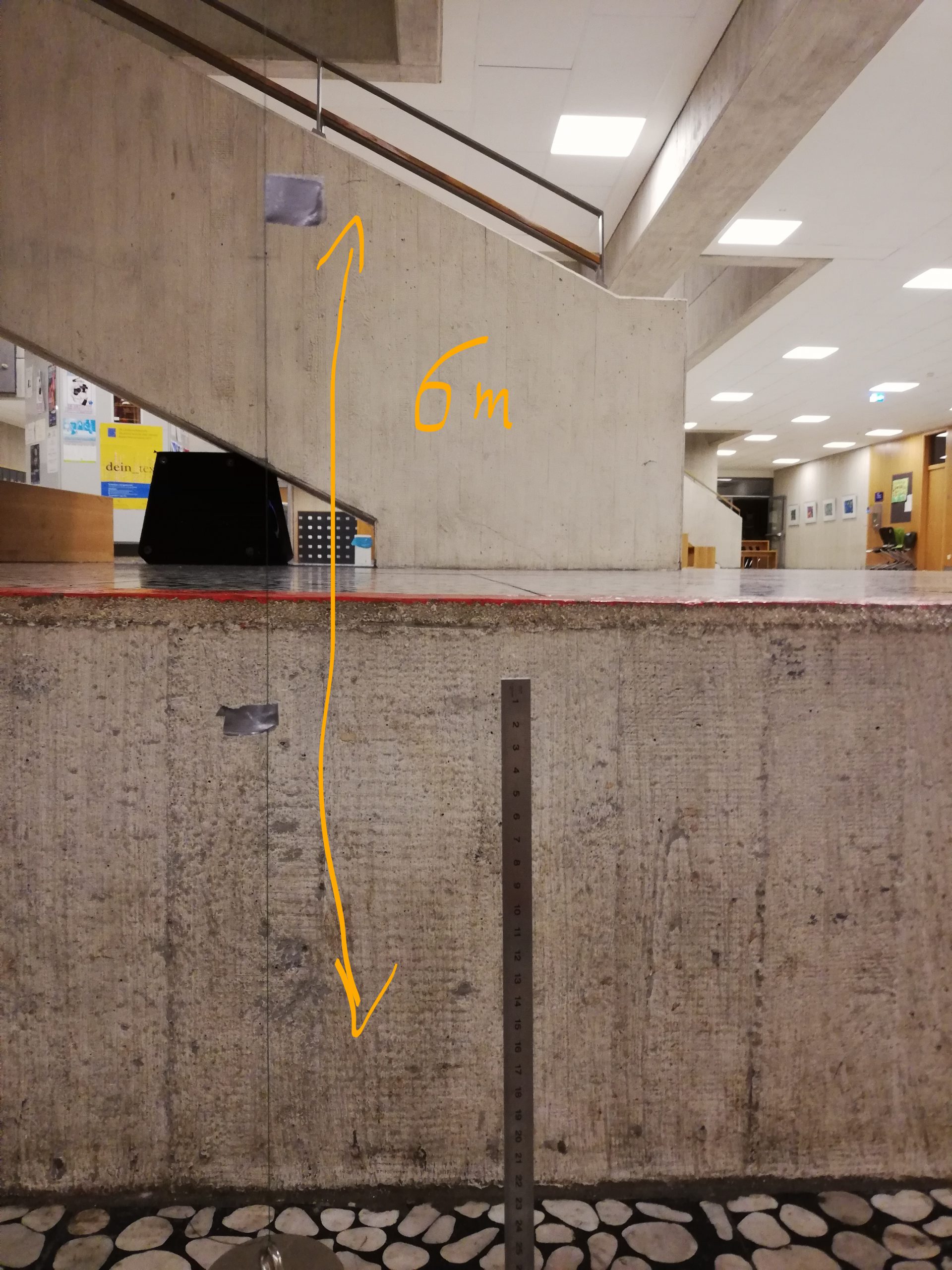
1. Entwicklungsschritt – mit Gewichtskräften von Massestücken im Treppenhaus


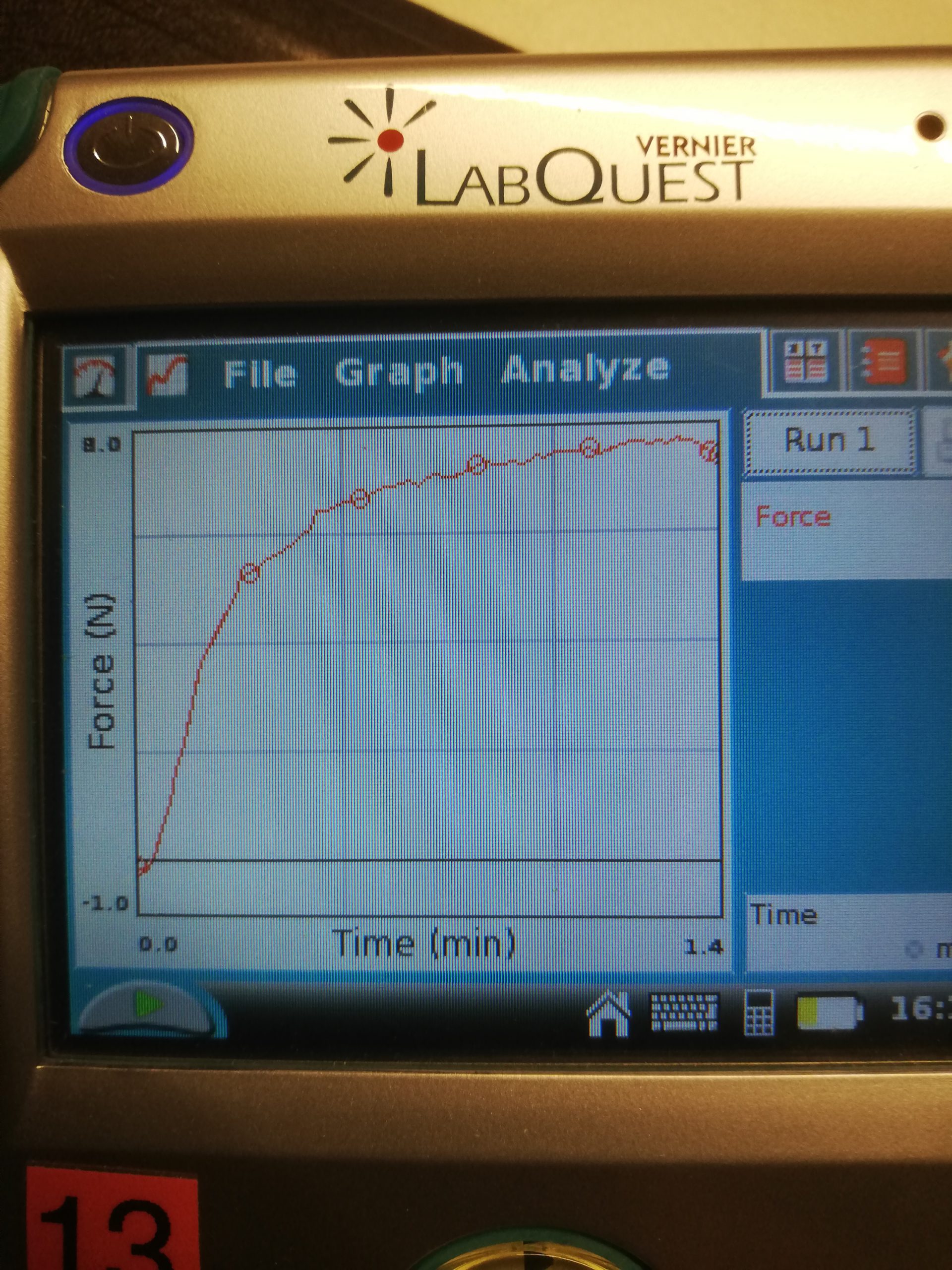
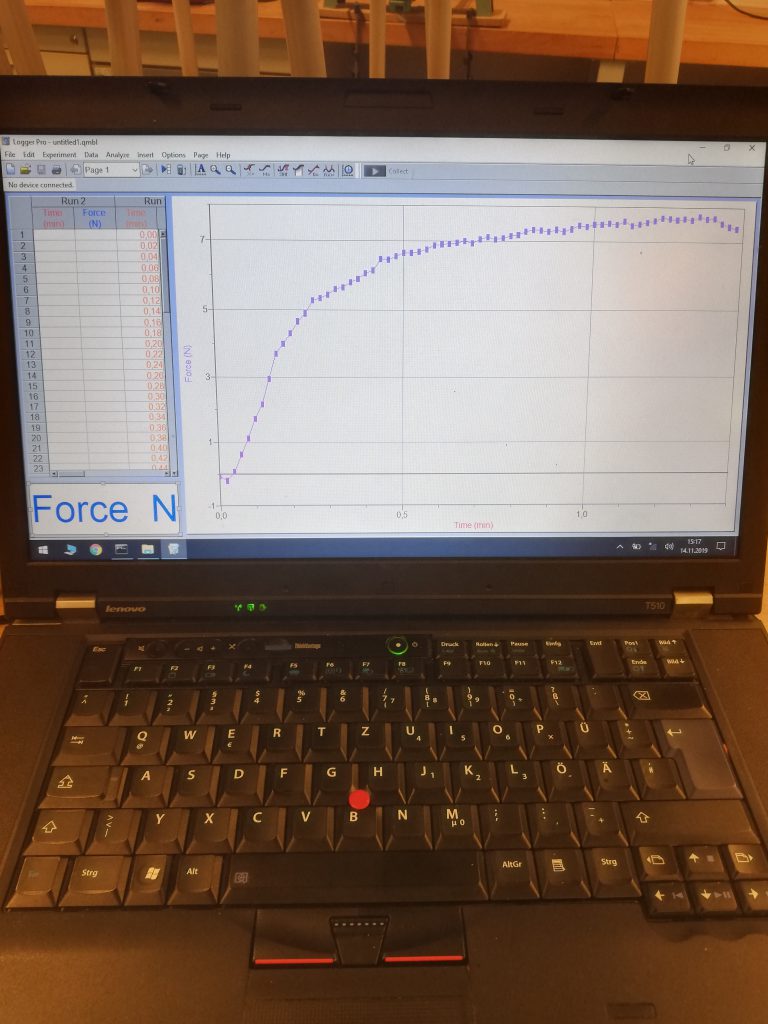
2. Entwicklungsschritt – mit Venier-Messwerterfassung und Einspannbox


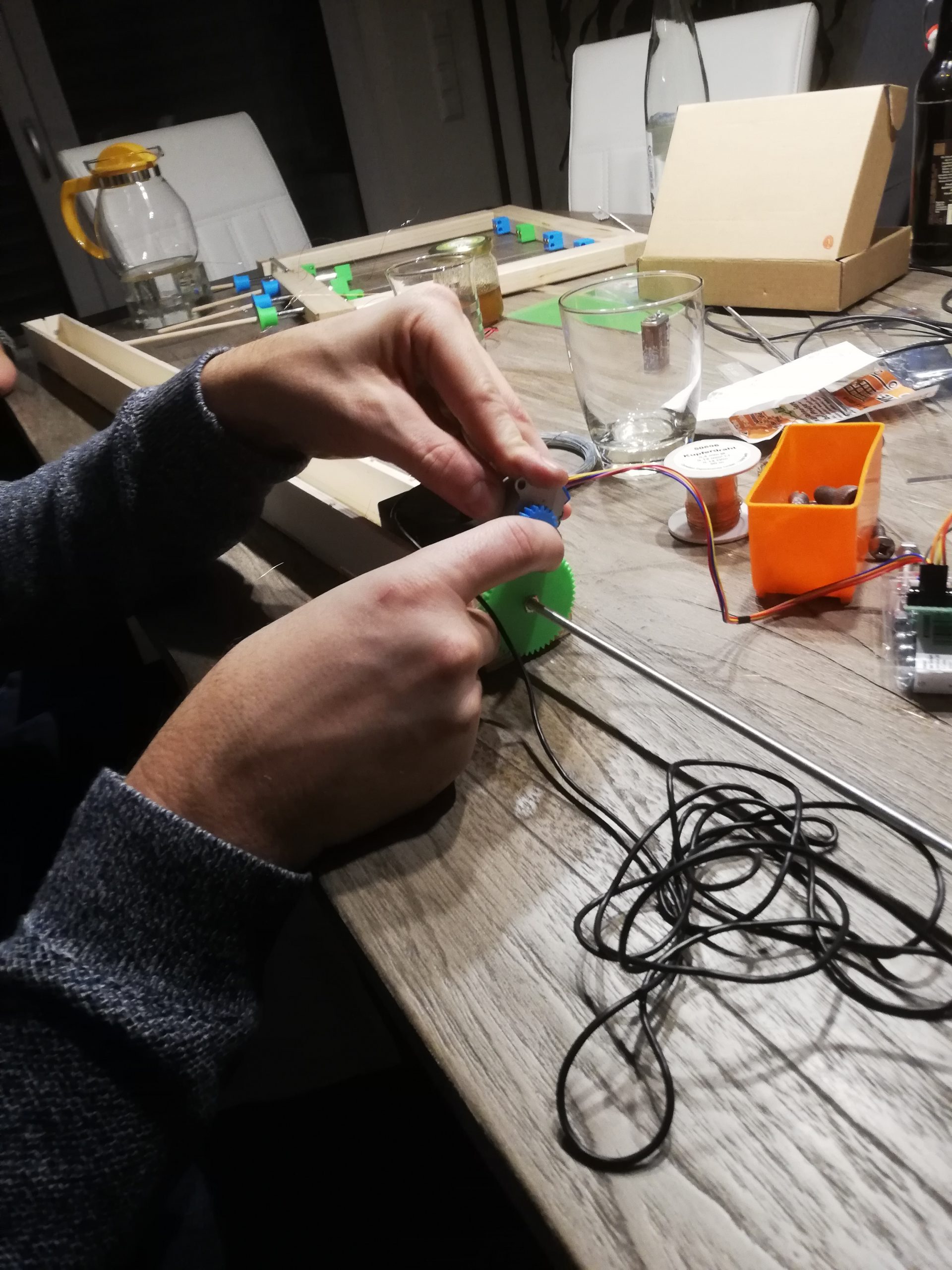
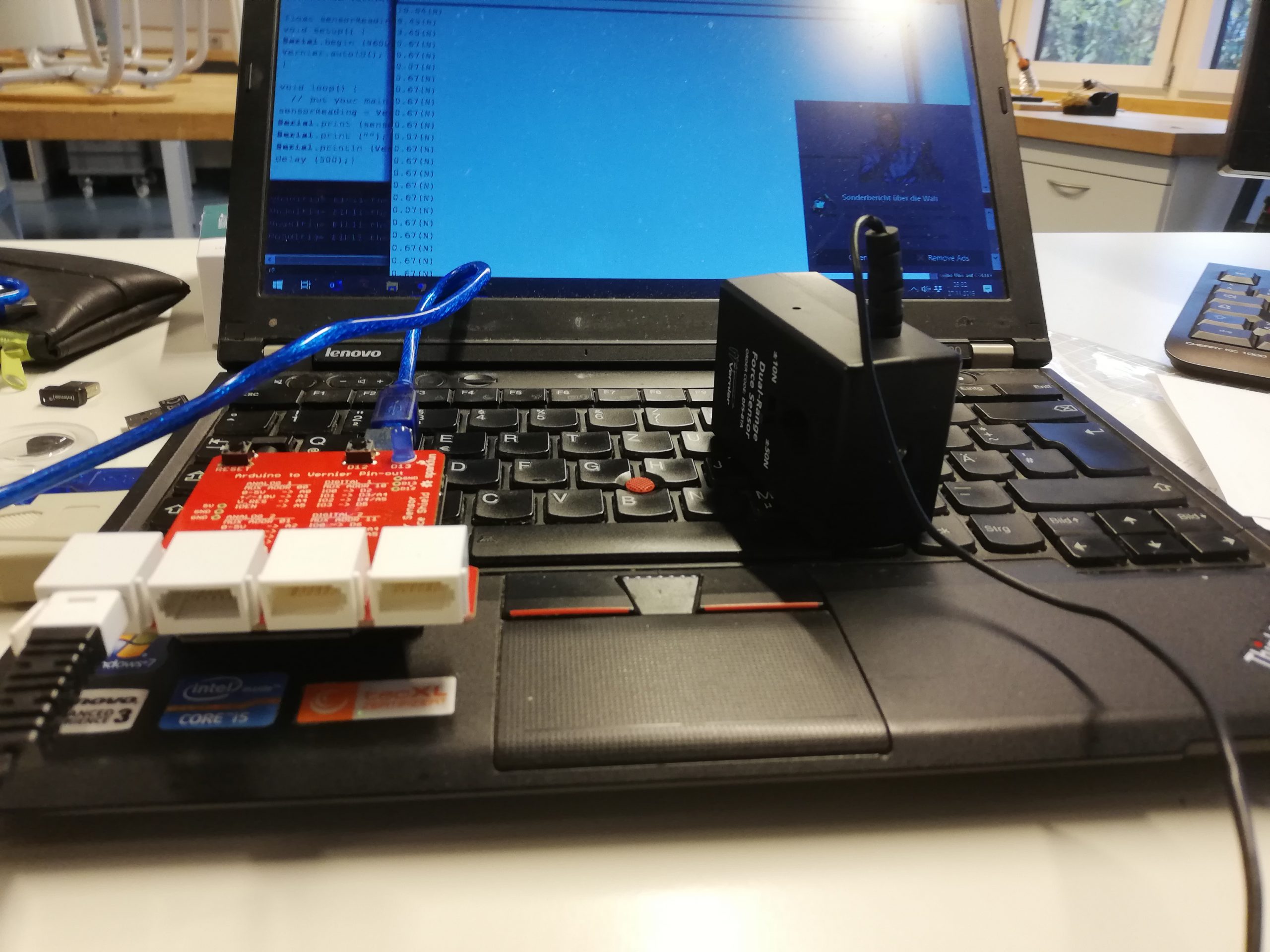
3. Entwicklungsschritt – mit Venier-Sensor, Einspannbox, Schrittmotor und Arduino
Komponenten des fertigen Zugversuchs

Sensor mit 3 Möglichkeiten der Messwerterfassung:
- Vernier-Handgerät
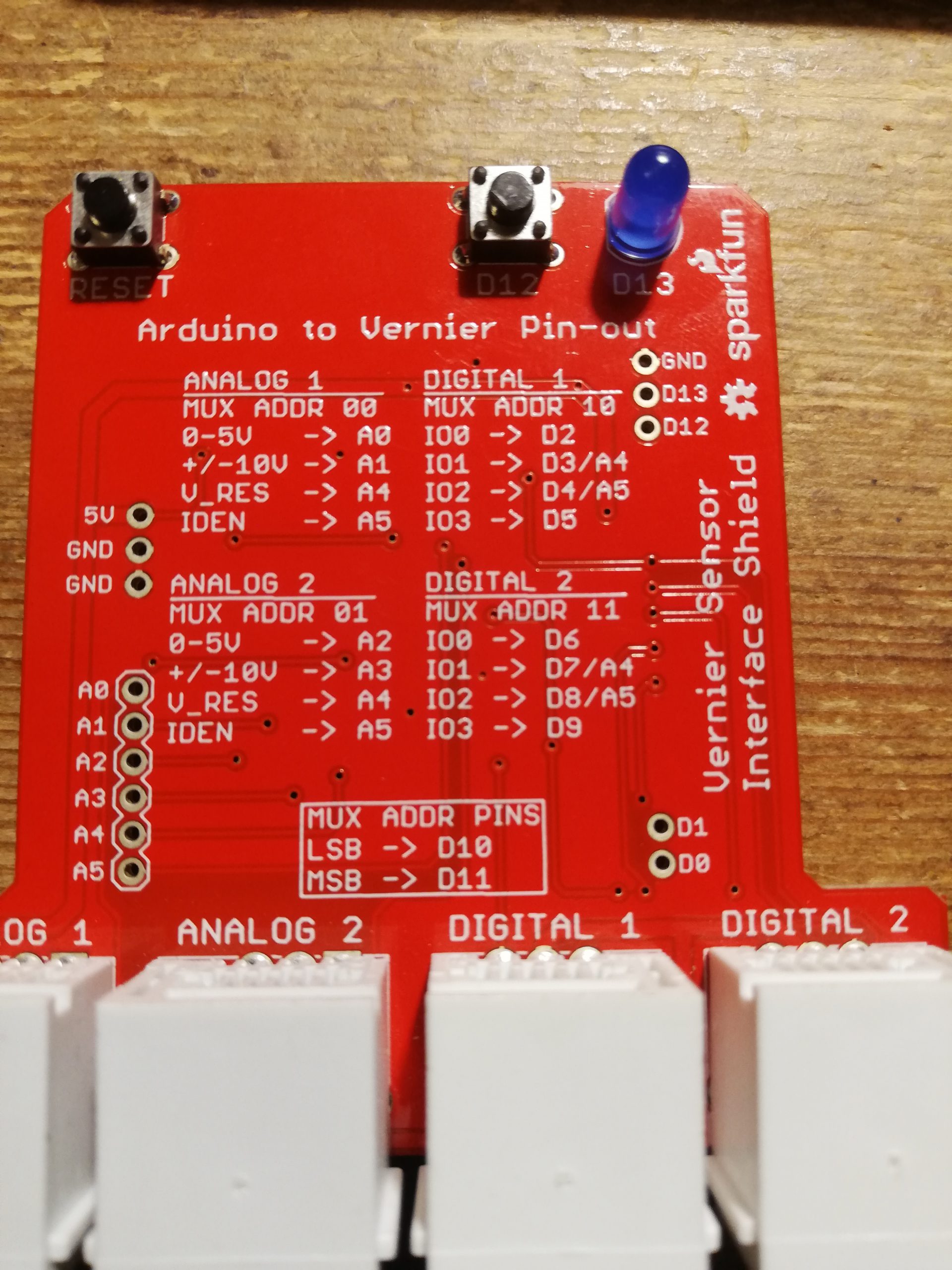
- Arduino mit Vernier-Arduino-Shield
- Arduino mit Vernier-Arduino-Protoboard, welches nur 3 Anschüsse benötigt (5V,GND,A0)

Komponenten des fertigen Zugversuchs (2):
- gedruckte Zahnräder mit Aufnahmen für Schrittmotor und M5-Mutter
- Gewindestange
- Sensor und gedruckte Halterung mit Aufnahme einer M5-Hutmutter
- gefräste Halterung für die Gewindestange und den Schrittmotor
- Schrittmotor mit Treiber und Arduino
