Spaichinger Bot 2.0
Momentan ist die Neuentwicklung des „Spaichinger Bot 2.0“ abgeschlossen. Dies ist eine Entwicklungsumgebung zur C-Programmierung von Fahrrobotern (Bots) mit integrierter Simulationsumgebung. Diese kostenlose, werbefreie und datenschutzkonforme Software setzen wir als Ergänzung zum Arduino ein. Beim Arduino benötigt man immer viel Zeit für die Elektronik, sodass das eigentliche Programmieren etwas kurz kommt. Beim Spaichinger Bot steht dann das Programmieren im Kontext der Robotik im Mittelpunkt. Die Entwicklungsumgebung umfasst auch Aufgaben, Lösungen, einen Überblick über die C-Befehle und einen Überblick über die Befehle für die Aktoren und Sensoren. Für die Corona-Zeit ist der Spaichinger Bot natürlich ideal, da die Schüler hierzu nur einen Computer (Windows) und keine weitere Hardware benötigen. Ich würde mich daher freuen, wenn Sie auf der Seite nwt-bw.de auf den Spaichinger Bot aufmerksam machen könnten.
Download und viele weitere Informationen findet man unter
Im Anhang finden Sie eine Bedienungsanleitung für den Spaichinger Bot.
Hier ein kleiner Ausschnitt aus der Einleitung:
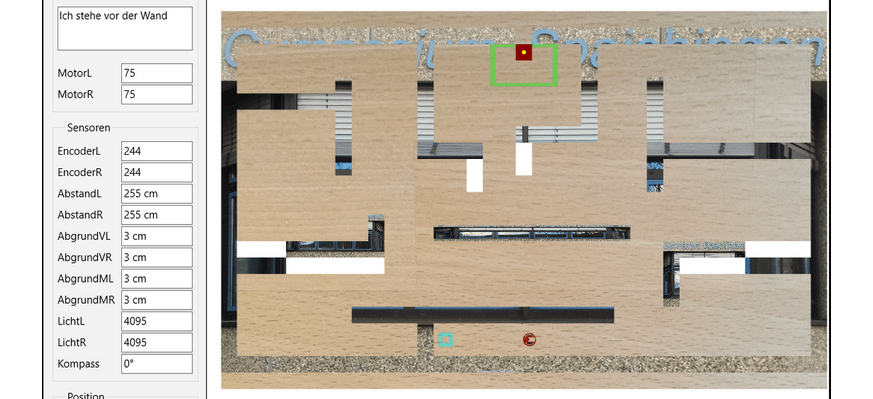
Die kostenlose, werbefreie und datenschutzkonforme Software Spaichinger Bot umfasst eine Entwicklungsumgebung mit Simulator. Sie ist ideal geeignet zum spielerischen Erlernen der Programmierspache C im Kontext der Programmierung eines Fahrroboters „Bot“. Hierzu wird kein realer Bot benötigt, da das Verhalten des Roboters beim Durchfahren von verschiedenen Labyrinthen simuliert wird. Der Roboter muss hierbei nicht nur durch die Labyrinthe hindurchfinden, sondern auch darauf achten, dass er in kein „Loch“ hineinfällt. Am Ziel steht ein Licht. Vor diesem muss er dann anhalten. Zur Wahrnehmung seiner Umwelt stehen dem Roboter verschiedene Sensoren zur Verfügung:
- 2 Encoder zur Bestimmung der Radumdrehungen der zwei Antriebsräder
- 2 Abstandsensoren (Ultraschallsensoren, links und rechts)
- 4 Abgrundsensoren (Ultraschallsensoren, vorne links, vorne rechts, Mitte links, Mitte rechts) zur Erkennung von “Löchern” im Boden
- 2 Lichtsensoren (LDR, links und rechts)
- 1 Kompass
Zum aktiven Eingreifen in die Umwelt, stehen dem Roboter folgende Aktoren zur Verfügung:
- Zwei Antriebsräder mit jeweils einem Motor
- 8 LEDs
- 1 Display zur Text-, Integer- und Float-Ausgabe.
- 1 Befehl zur zeitlich begrenzten Unterbrechung
Die simulierten Sensoren verhalten sich wie reale Sensoren.
In die Software sind 9 Programmieraufgaben zum Erlernen der Programmiersprache C (Variablen, Zuweisungen, Schleifen, Verzweigungen, Funktionen) integriert (siehe Reiter: „Aufgaben“). Unter dem Reiter „Lösungen“ stehen für diese Programmieraufgaben Lösungs-Programme zur Verfügung. Aufgabe 10 ist die ultimative Challenge. Der Bot soll mithilfe seiner Sensoren das grüne Zielrechteck selbstständig finden und dort anhalten. Das Programm soll so geschrieben werden, dass es bei (fast) allen Labyrinthen zum Erfolg führt. Für diese Challenge ist kein Lösungsprogramm in die Software integriert. Unter dem Reiter „C-Befehle“ findet man alle notwendigen Befehle der Programmiersprache C. Unter dem Reiter „Bot-Befehle“ befinden sich die Befehle für die Ansteuerung der Aktoren und Sensoren des Bots.
Die Software Spaichinger Bot läuft unter dem Betriebssystem Microsoft Windows (Windows 7, Windows 8, Windows 8.1 und Windows 10) auf jedem Notebook oder PC. Die Downloaddatei “Bot.zip” umfasst alle benötigten Komponenten: Entwicklungsumgebung, Compiler und Simulationssoftware. Die Software braucht nicht installiert zu werden (portable Software) und kann nach dem Entpacken der ZIP-Datei sogar von einem USB-Stick aus betrieben werden.
Ich freue mich auf Ihre Rückmeldungen.
Herzliche Grüße
Markus Ziegler
Mailkontakt: Markus.Ziegler (at) zsl-rsfr.de